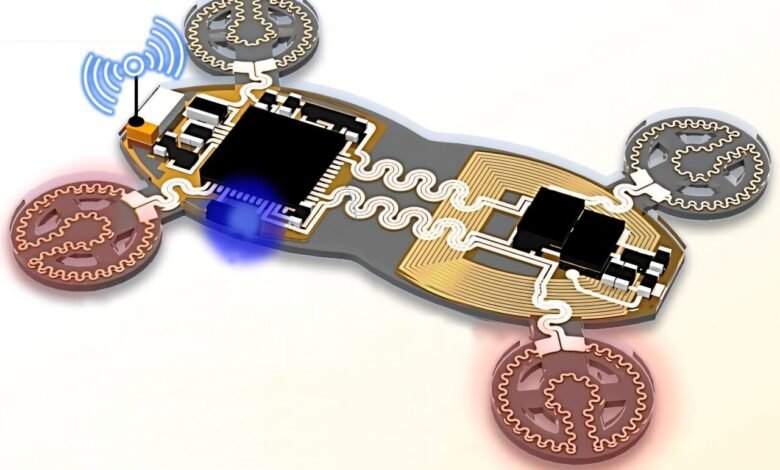
Estos pequeños robots usan el magnetismo para moverse y explorar espacios estrechos, potencialmente incluyendo escombros en desastre o el cuerpo humano. Crédito: Jennifer M. McCann
Un robot pequeño, suave y flexible que puede arrastrarse a través de escombros de terremotos para encontrar víctimas atrapadas o viajar dentro del cuerpo humano para entregar medicina puede parecer ciencia ficción, pero un equipo internacional dirigido por investigadores de Penn State está pione tales robots adaptables al integrar electrónica flexible con movimiento magnéticamente controlado.
La robótica suave, a diferencia de los robots rígidos tradicionales, están hechos de materiales flexibles que imitan el movimiento de los organismos vivos. Esta flexibilidad los hace ideales para navegar en espacios estrechos, como escombros en una zona de desastre o las intrincadas vías del cuerpo humano. Sin embargo, la integración de sensores y electrónica en estos sistemas flexibles ha planteado un desafío significativo, según Huanyu “Larry” Cheng, James L. Henderson, Jr. Profesor Asociado Memorial de Ciencias y Mecánica de Ingeniería en Penn State.
“El mayor desafío realmente fue hacerlo inteligente”, dijo Cheng, autor co-correspondiente del estudio del equipo publicado en Nano-Micro Letters. “Para la mayoría de las aplicaciones, la robótica blanda ha sido un sistema de comunicación unidireccional, lo que significa que dependen del control externo para navegar a través de entornos complejos. Nuestro objetivo era integrar sensores inteligentes para que estos robots pudieran interactuar con su entorno y operar con una intervención humana mínima”.




Un factor principal para hacer que estos robots sean más inteligentes radica en la integración de la electrónica flexible, lo que permite sus características clave.
“Queríamos diseñar un sistema donde la robótica suave y la electrónica flexible funcionen sin problemas”, dijo Cheng. “La electrónica tradicional es rígida, lo que dificulta la integración. Nuestra solución fue distribuir los componentes electrónicos de una manera que preserva la flexibilidad del robot mientras mantiene un rendimiento robusto”.
Cheng y su equipo dispararon videos de los robots en acción, capturando su comportamiento dinámico mientras se arrastran y rodan hacia una pelota para moverse a lo largo de un curso simple. Los robots se mueven utilizando materiales magnéticos duros integrados en su estructura flexible, lo que permite que los robots respondan previsiblemente a un campo magnético externo.
Al ajustar la fuerza y la dirección del campo, los investigadores pueden controlar los movimientos de los robots, como doblar, torcer o rastrear, sin potencia a bordo o conexiones físicas como cables.
Un obstáculo importante en el desarrollo de esta tecnología fue descubrir cómo evitar que la electrónica flexible obstaculice el movimiento del robot.
“Aunque diseñamos la electrónica para que sea flexible, su rigidez sigue siendo cientos o miles de veces mayor que el material robótico suave”, dijo Cheng. “Para superar esto, distribuimos la electrónica a través de la estructura, reduciendo su impacto en el movimiento”.
Otro desafío fue bloquear la interferencia eléctrica no deseada, lo que puede interrumpir cómo funciona un dispositivo o sistema electrónico. Esta interferencia proviene de fuentes externas, como otras electrónicas o señales inalámbricas. Dicha interferencia obstaculizaría el movimiento y afectaría el rendimiento del sensor.
“Los campos magnéticos son cruciales para controlar el movimiento, pero también pueden interrumpir las señales electrónicas”, señaló Cheng. “Tuvimos que diseñar cuidadosamente el diseño electrónico para minimizar estas interacciones, asegurando que los sensores se mantuvieran funcionales incluso en presencia de fuertes campos magnéticos”.
Con la interferencia magnética minimizada, los robots se pueden guiar de forma remota utilizando campos electromagnéticos o imanes de mano, lo que limita la intervención humana que necesitan. Además, los sensores integrados les permiten reaccionar de manera autónoma a las señales ambientales. En la búsqueda y el rescate, por ejemplo, son lo suficientemente inteligentes como para navegar por los escombros detectando calor u obstáculos. En aplicaciones médicas, pueden responder a los cambios o presión de pH, asegurando la administración precisa de los medicamentos o la recolección precisa de la muestra.
El siguiente paso para el equipo de Cheng es refinar la tecnología para tales aplicaciones, incluida la creación de una “píldora robot”.
“Una de las aplicaciones potenciales más fascinantes es en dispositivos médicos implantables”, dijo el coautor Suk-Won Hwang, profesor asociado de la Escuela de Graduados de Ciencia y Tecnología Convergente, Universidad de Corea. “Estamos trabajando en miniaturizar el sistema para que sea adecuado para el uso biomédico. Imagine un pequeño sistema robótico que podría tragarse como una píldora, navegar a través del tracto gastrointestinal y detectar enfermedades o entregar medicamentos precisamente donde se necesitan”.
Dicha tecnología podría proporcionar una alternativa menos invasiva a los procedimientos de diagnóstico tradicionales, como las biopsias, recopilando datos directamente del paciente en tiempo real, según los investigadores.
“Con sensores integrados, estos robots podrían medir los niveles de pH, detectar anormalidades e incluso entregar medicamentos a ubicaciones precisas dentro del cuerpo”, explicó Cheng. “Eso significa menos cirugías invasivas y tratamientos más específicos, mejorando los resultados de los pacientes”.
Cheng dijo que también imagina futuras aplicaciones en tratamientos vasculares.
“Si podemos hacer que estos robots sean aún más pequeños, podrían inyectarse en los vasos sanguíneos para tratar enfermedades cardiovasculares o entregar medicamentos directamente a las áreas afectadas”, dijo Cheng. “Eso abriría posibilidades completamente nuevas para los tratamientos médicos no invasivos”.
Si bien el equipo aún no ha dado a estos robots un nombre oficial, Cheng dijo que están abiertos a sugerencias.
Más información: Sungkeun Han et al, inalámbrico, robot suave programable integrado en el sistema, letras nano-micro (2025). Doi: 10.1007/s40820-024-01601-3
Proporcionado por la Universidad Estatal de Pensilvania
Cita: el robot pequeño y suave flexiona su potencial como Lifesaver (2025, 8 de abril) Recuperado el 8 de abril de 2025 de https://techxplore.com/news/2025-04-tiny-soft-Robot-Flexes-potential.html
Este documento está sujeto a derechos de autor. Además de cualquier trato justo con el propósito de estudio o investigación privada, no se puede reproducir ninguna parte sin el permiso por escrito. El contenido se proporciona solo para fines de información.